1. 标题
GNSS多系统紧组合相对定位模型与性能评估
Model and performance assessment of tightly combined multi-GNSS relative positioning
2. 成果信息
Wu M, Zhang X, Liu W, Wu R, Zhang R, Le Y, Wu Y. Influencing factors of differential inter-system bias and performance assessment of tightly combined GPS, Galileo, and QZSS relative positioning for short baseline. Journal of Navigation, 2019, 72(4): 965-986. DOI: 10.1017/S0373463318001017.
Wu M, Liu W, Wu R, Zhang X. Tightly combined GPS/Galileo RTK for short and long baselines: model and performance analysis. Advances in Space Research, 2019, 63(7): 2003-2020. DOI: 10.1016/j.asr.2018.12.008.
Wu M, Liu W, Wang W, Zhang X. Differential Inter-System Biases Estimation and Initial Assessment of Instantaneous Tightly Combined RTK with BDS-3, GPS, and Galileo. Remote sensing, 2019, 11(12), 1430. DOI: 10.3390/rs11121430.
资助信息:国家自然科学基金(41774031),国家杰出青年科学基金(41825009),创新研究群体科学基金(41721003),中央高校基本科研业务费专项资金新青年教师计划项目(G1323541876),武汉市科技计划项目(2018010401011270)
3. 成果团队成员
吴明魁,博士,中国地质大学(武汉)地理与信息工程学院,讲师,硕士生导师,主要从事多频多系统GNSS精密定位技术及其应用研究。(联系邮箱:wumk@cug.edu.cn)
刘万科,博士,武汉大学测绘学院,教授,博士生导师,主要从事GNSS精密导航与定位、精密定轨等方面的教学和科研工作。
张小红,博士,武汉大学测绘学院,教授,博士生导师,主要从事卫星导航定位技术及其应用、组合导航等方面的教学和研究工作。
4. 成果介绍
随着GPS、GLONASS、BDS、Galileo四大全球卫星导航系统,以及QZSS、IRNSS等区域导航系统的发展与建设,卫星导航定位技术已进入多系统融合的GNSS导航定位时代。在此背景下,如何充分利用GNSS多系统多频率资源进一步提升导航定位的精度、可用性和可靠性,真正实现GNSS系统间的兼容、互操作以及可互换,已成为近年来GNSS导航定位领域的热点研究课题。为了实现互操作,不同GNSS系统播发的导航信号中既有相同频率(称之为重叠频率信号)的信号也有不同频率(称之为非重叠频率信号)的信号。基于此,我们针对不同GNSS系统的重叠频率及非重叠频率,研究了GNSS多系统紧组合精密相对定位的模型与方法,并评估了其定位性能。
(1)分析了重叠频率的接收机间差分系统间偏差(DISB)的时变特征与影响因素,并评估了GPS/Galileo/QZSS重叠频率紧组合相对定位的性能。数据处理结果表明,接收机重启、固件更新、抗多径滤波器状态以及观测值类型都可能对DISB的估值造成影响;相较于传统的松组合模型(LCM),紧组合模型(TCM)不仅能提高模糊度固定的Bootstrapping成功率和Ratio值、减小ADOP值,还能显著提升模糊度固定成功率和定位精度,尤其是在单系统可用卫星数较少、仅有单频观测值可用的情形下,模糊度固定成功率可提高20%-50%。图1为截止高度角为20o、仅使用GPS/Galileo/QZSS单频观测值(L1-E1-L1)的三维(E/N/U)定位误差。由图可知,相较于松组合模型,紧组合模型可显著减少浮点解和模糊度错误固定解、增加模糊度正确固定解。
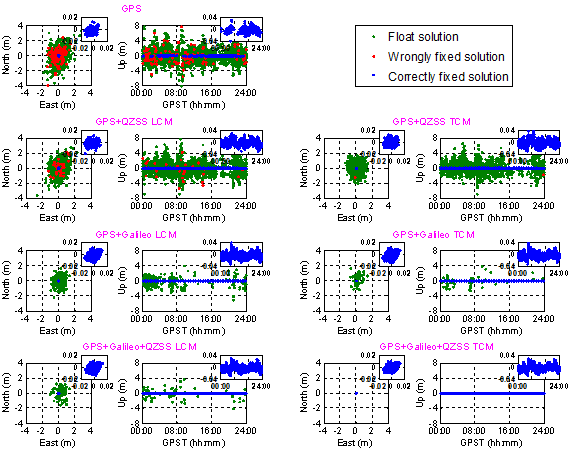
图1. 截止高度角为20o、GPS/Galileo/QZSS单频观测值(L1-E1-L1)的定位误差
(2)推导了同时顾及重叠频率(L1-E1/ L5-E5a)与非重叠频率(L2-E5b)的GPS/Galileo 短基线与长基线RTK模型,并提出了一种适用于重叠频率与非重叠频率的参数化方法,可解决DISB参数与电离层参数相关性引起的法方程秩亏问题;采用不同场景的实测数据,从ADOP、模糊度固定条件数、降相关系数、搜索次数、固定成功率、首次固定时间以及定位精度等方面,评估了GPS/Galileo L1-E1/L2-E5b/L5-E5a紧组合RTK的性能。数据处理结果表明,相较于松组合模型,紧组合模型可同时提升模糊度固定效果与定位精度。表1为一组车载动态短基线(0.05-9.5km)的模糊度固定效果与定位误差。由表可知,使用紧组合模型时,Ratio值、ADOP、条件数与搜索次数都得到显著改善。同时,模糊度降相关系数与定位精度也得到一定程度改善。
表1. 车载动态短基线的模糊度固定效果与定位误差
|
10° |
20° |
LCM |
TCM |
Improve |
LCM |
TCM |
Improve |
Ratio |
16.0 |
20.4 |
27.5% |
22.1 |
25.8 |
16.7% |
ADOP (cycle) |
0.027 |
0.021 |
22.2% |
0.023 |
0.021 |
8.7% |
Decorrelation number |
0.026 |
0.027 |
3.8% |
0.030 |
0.032 |
6.7% |
Condition number |
199.2 |
169.6 |
14.9% |
167.6 |
135.3 |
19.3% |
Search count |
150.1 |
112.0 |
25.4% |
211.3 |
154.1 |
27.1% |
Empirical success rate |
96.6% |
97.0% |
0.4% |
96.8% |
97.3% |
0.5% |
E (cm) |
1.54 |
1.41 |
8.4% |
1.44 |
1.28 |
11.1% |
N (cm) |
1.51 |
1.40 |
7.3% |
1.59 |
1.44 |
9.4% |
U (cm) |
3.10 |
2.85 |
8.1% |
3.16 |
3.12 |
1.3% |
(3)基于北斗三号(BDS-3)工作星播发的新体制信号B1C/B2a,分析了BDS-3 /GPS/Galileo重叠频率DISB的大小与时域稳定性,并初步评估了BDS-3/GPS/Galileo单历元短基线紧组合RTK的性能,证实了基于BDS-3/GPS/Galileo重叠频率多系统紧组合RTK的可行性。图2为短基线下相同类型(a)与不同类型(b)接收机间的BDS-3 B1C/GPS L1重叠频率相位与伪距DISB序列。由图可知,相同类型接收机时相位与伪距DISB接近于0,相对定位中可忽略其影响;不同类型接收机时DISB不为0,但在时间域上十分稳定,可事先标定并改正。
 (a) |
 (b) |
图2. BDS-3/GPS L1-B1C相位与伪距DISB(a:相同类型接收机;b:不同类型接收机)
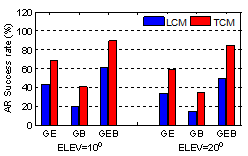
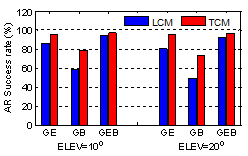
图3为10o与20o截止高度角时松组合与紧组合(改正DISB)模型的单历元模糊度固定成功率。由图可知,无论是GPS/Galileo,GPS/BDS-3还是GPS/Galileo/BDS-3组合,相较于松组合模型,紧组合模型都能显著提高模糊度固定效果(单频观测值时提升约24.8%、21.1%、28.8%、26.0%、19.8%、34.7%;双频观测值时提升约9.6%、21.0%、1.8%、14.5%、24.6%、3.6%),初步证实了北斗三号与GPS等其他GNSS系统重叠频率紧组合RTK的可行性。
 (a) |
 (b) |
图3. 10o与20o截止高度角时,松组合与紧组合RTK的模糊度固定成功率(a: 单频;b:双频)。GE代表GPS/Galileo,GB代表GPS/BDS-3,GBE代表GPS/BDS-3/ Galileo;模糊度固定时Ratio阈值为3.0