1. 标题
NeuroSLAM: A Brain Inspired SLAM System for 3D Environments
NeuroSLAM: 面向三维动态环境的类脑SLAM系统
2. 成果信息
Fangwen Yu, Jianga Shang, Youjian Hu and Michael Milford. NeuroSLAM: A Brain inspired SLAM System for 3D Environments. Biological Cybernetics, 2019, https://doi.org/10.1007/s00422-019-00806-9
3. 成果团队成员
余芳文,我院2015级博士生。主要研究方向类脑三维导航,神经形态三维 SLAM。
尚建嘎,我院软件工程系教授、博士生导师。主要研究方向室内定位、室内GIS、软件工程、机器人导航等。
胡友健,我院测绘科学与技术系教授、博士生导师。主要研究方向工程变形与地质灾害监测、GNSS数据处理、LiDAR数据处理与应用。
Michael Milford,昆士兰科技大学教授、博士生导师。主要研究方向仿生机器人导航定位、机器人视觉、无人驾驶等。
该项目得到了国家重点研发计划项目(No. 2016YFB0502200)、澳大利亚研究委员会Future Fellowship(No. FT140101229)、我校大学生自主创新领航团队项目(No. 1610491T08)、湖北省软科学基金项目(No. QLZX2014010)等资助。
4. 成果介绍
陆、海、空以及太空机器人的应用越来越广泛,然而在复杂三维动态未知环境下,机器人三维自主导航仍面临许多难题。而自然界中的人类和动物,比如蝙蝠,却具有非凡的三维空间认知和导航能力。近年来,神经科学家们逐渐发现了大脑三维导航的神经机制。其中2014年诺贝尔生理医学奖颁发给了位置细胞(Place Cell)、网格细胞(Grid Cell)的三位神经科学家John O'Keefe、Edvard I. Moser和May-Britt Moser,以表彰他们在发现大脑定位系统作出的杰出贡献。这些重要发现也为我们开发新的智能三维导航技术提供了重要灵感和理论基础。
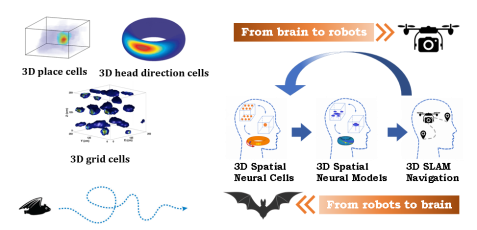
本文通过借鉴大脑三维导航神经机制,为机器人开发了一套全新的类脑三维定位与制图系统。以低成本的相机作为主要传感器,以连续的图像流作为主要输入来计算局部环境线索和三维运动信息。在此基础上,基于多维连续吸引子神经网络,利用3D 网格细胞(3D Grid Cell)和3D方向细胞(3D Head Direction Cell)来表达机器人的在三维空间中的4自由度位姿,同时进行3D路径积分(3D Path Integration)和位姿修正,并基于Local View Cell、 3D Grid Cell、3D Head Direction Cell来编码机器人的三维空间经验,实现了机器人在三维环境下的同步定位与制图。
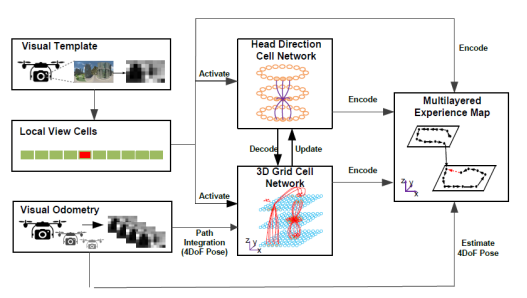
通过利用多组不同三维环境下的数据集对系统进行了测试,本系统能够实现生成高精度、拓扑正确的三维经验地图,可支持三维环境中移动机器人的智能自主导航。
本文是NeuroSLAM项目的部分成果之一。NeuroSLAM项目针对脑科学与机器人三维导航领域一些非常前沿的关键科学难题,从机器人学、计算神经科学、空间导航等学科交叉的全新研究视角,在对大脑三维导航神经机理、三维导航细胞计算模型到机器人三维同步定位、制图与导航应用的系统性探索实践基础上,形成了一套新的类脑三维导航基础理论和技术体系。为进一步探究揭示大脑三维导航神经机理与构建类脑智能三维导航系统奠定了重要基础,具有重要的科学意义与应用价值。该项目是一个长期的研究项目,以创造一种像人类一样进行三维空间导航的智能机器人作为愿景,将持续不断推进类脑三维导航新理论、新技术、新应用地快速发展。
更多信息,请关注我们的项目网站:www.NeuroSLAM.net
关于NeuroSLAM项目成果的相关报道,请关注 http://www.cug.edu.cn/info/10506/92199.htm
http://xgxy.cug.edu.cn/info/1056/2281.htm